
اصول کار اینورتر :
در ریاضیات مهندسی قضیهای وجود دارد که ثابت میکند هر تابع دورهای یا تناوبی (Periodic) با دوره تناوب T و فرکانس f=1/T را میتوان به یک سری نامتناهی شامل حاصل جمع جملات سینوسی و کسینوسی تجزیه نمود که به آن «سری فوریه» (Fourier Series) گفته میشود. اگر (v(t یک موج تناوبی ولتاژ تابع زمان باشد، شکل کلی تجزیه آن به جملات سری فوریه به شکل زیر خواهد بود:

رابطه ۱ : سری فوریه پایه تحلیل ریاضی اصول کار اینورتر
در این سری، هر جمله شامل یک تابع سینوسی یا کسینوسی با یک دامنه و فرکانس مشخص است که فرکانس ، مضرب صحیح n از فرکانس شکل موج اصلی است و دامنه جمله n یا همان هارمونیک n از روابط زیر محاسبه میگردد:
رابطه ۲ : سرعت زاویهای
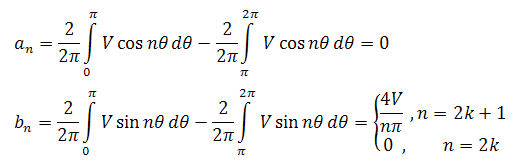
رابطه ۳ : دامنه جملات کسینوسی سری فوریه
رابطه ۴ : دامنه جملات سینوسی سری فوریه
به فرکانس موج اصلی یعنی f هارمونیک اصلی و به فرکانس nf هارمونیک فرعی nام گفته میشود.
V۰ مقدار متوسط یا DC شکل موج در یک دوره تناوب است که مسلماً برای یک شکل موج ولتاژ متقارن نسبت به محور زمان، سطح زیر منحنی و در نتیجه مقدار متوسط DC صفر خواهد بود.
موج مربعی کامل ۲ سطحی :
به عنوان مثال اگر خروجی اینورتر را به سادهترین شکل ممکن به صورت یک موج مربعی با دامنه V درنظر بگیریم که بین ۲ سطح ولتاژ V+ و V- نوسان میکند، شکل موج خروجی اینورتر را به صورت یک تابع ریاضی پله به صورت زیر میتوان نوشت:
رابطه ۵ : توصیف ریاضی یک موج مربعی کامل ۲ سطحی به صورت تابع پله
با تغییر متغیر زاویه به جای زمان جهت سهولت محاسبات خواهیم داشت:
![]()
رابطه ۶ : تغییر متغیر زمان به جای زاویه
رابطه ۵ و ۶ : دامنه هارمونیکهای موج مربعی کامل ۲ سطحی
بنابراین شکل موج فوق فقط دارای هارمونیکهای سینوسی فرد میباشد که مقدار آن برای ۵ هارمونیک نخست به شرح زیر محاسبه میگردد:

رابطه ۷ : پنج هارمونیک نخست شکل موج مربعی کامل ۲ سطحی
از رابطه ۷ نتایج زیر بدست میآید:
۱) دامنه هارمونیکها به نسیت عکس شماره هارمونیک کاهش مییابد.
۲) دامنه هارمونیکهای نخست مزاحم به نسبت دامنه هارمونیک اصلی مقدار قابل توجهی دارند. به عنوان مثال، دامنه هارمونیک سوم %۳۳ و دامنه هارمونیک پنجم %۲۰ دامنه هارمونیک اصلی میباشد که به هیچوجه مطلوب نیست.
در شکل ۲ میتوان دید که چگونه شکل موج سبزرنگ که نمایشگر جمع ۳ هارمونیک نخست (به رنگهای به ترتیب آبی و بنفش و زرد) است، در حال نزدیک شدن به شکل موج اصلی به رنگ قرمز است. واضح است که هر چه تعداد هارمونیکهای بیشتری با هم جمع شوند، این شکل به شکل موج اصلی نزدیکتر خواهد شد.
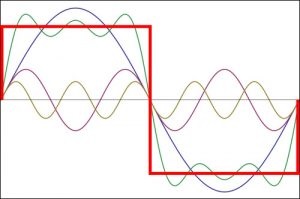
شکل ۲ : مقایسه جمع سه هارمونیک نخست با شکل موج مربعی کامل ۲ سطحی
روشهای حذف هارمونیک در خروجی اینورتر :
وجود هارمونیک در شکل موج خروجی اینورتر معایب زیادی به همراه دارد:
۱) اتلاف انرژی در فرکانسهایی که توسط بار قابل استفاده نبوده و در نهایت به صورت گرما تلف میشود.
۲) اشغال ظرفیت مفید بخشهای مختلف سیستم انتقال و توزیع برق مانند کابلها، ترانسفورماتورها و بانکهای خازنی
۳) ایجاد گشتاور مزاحم در موتورها به صورت ایجاد ضرباتی در خلاف جهت گردش موتور به دلیل همفاز نبودن هارمونیکها با هارمونیک اصلی در بخشهایی از دوره تناوب موج که منجر به تولید صدای ناهنجار و همچنین آسیب به بخشهای مکانیکی موتور مانند شفت و بلبیرینگها میشود.
۴) ایجاد نویز در رنج فرکانس امواج رادیویی به صورت ایجاد پارازیت در صدای رادیو یا نویز در تصویر تلویزیونهای نزدیک
۵) عدم کارکرد صحیح دستگاههایی که برمبنای ورودی سینوسی خالص طراحی شدهاند، مانند درایوهای کنترل سرعت موتور یا شمارندههای پالس ساعت
جهت مقایسه کیفیت خروجی اینورترها، از پارامتری تحت عنوان «مجموع اعوجاج هارمونیکی» Total Harmonic Distortion یا THD با تعریف زیر استفاده میشود:

رابطه ۸ : فرمول محاسبه مجموع اعوجاج هارمونیکی
در رابطه فوق V۱ دامنه هارمونیک اصلی و V۲ و V۳ و …. دامنه هارمونیکهای بعدی فرعی و Vrms مقدار مؤثر کلی موج را نشان میدهد. هرچه THD کوچکتر باشد، بیانگر کمتر بودن دامنه هارمونیکهای فرعی به نسبت دامنه هارمونیک اصلی و کیفیت بهتر خروجی اینورتر است.
ملاحظه میگردد که در طراحی ساده فوق، هارمونیکهای مزاحم شماره ۳ و ۵ و ۷ و ۹ و … دارای دامنه قابل توجهی هستند که در صورت تغذیه یک موتور توسط چنین اینورتری، موجب داغ شدن سیم پیچ و در نهایت ضربات گشتاوری هارمونیکها و گرمای اضافی تولید شده در سیمپیچها سبب آسیب به موتور میگردند.
از روابط ۶ و ۸ مقدار THD اینورتر با شکل موج مربعی کامل به صورت زیر محاسبه میگردد:

رابطه ۹ : محاسبه THD موج مربعی کامل ۲ سطحی
یک روش رایج و کمهزینه کاهش THD برای بارهای غیرحساس نسبت به هامورنیک مثل بارهای اهمی یا بارهایی که خود دارای منبع تغذیه داخلی یا خارجی هستند و در نهایت ورودی AC توسط این منبع تغذیه به ولتاژDC تبدیل میشود و بنابراین وجود هارمونیک اهمیت چندانی برای آنها ندارد، استفاده از موج مربعی ۳ سطحی به جای موج مربعی ۲ سطحی فوق است. به اینورترهای دارای این نوع خروجی، «اینورتر شبه سینوسی»(Quasi-Sinusoidal یا (Semi-Sinusoidal) یا «اینورتر سینوسی اصلاح شده» (Modified Sine Wave یا MSW) گفته میشود. در این روش، ابتدا و انتها و میانه دوره تناوب موج مربعی دارای یک باند خاموش (Dead Band) است و به این ترتیب، تعدادی از هارمونیکهای مزاحم حذف و دامنه بقیه نیز کاهش مییابد.
اگر مطابق شکل ۳ عرض قسمت روشن پالسهای مثبت و منفی در مجموع ۱/۳ دوره تناوب بوده و ۲ بخش مثبت و منفی نسبت به میانه دوره تناوب متقارن باشند، طبق رابطه ۴ هارمونیکهای فرد مضرب ۳ شامل هارمونیکهای شماره ۳، ۹، ۱۵، ۲۱، ۲۷ و … حذف میشوند و THD از %۴۸ به %۳۱ کاهش مییابد:

رابطه ۱۰ : محاسبه THD موج شبه سینوسی
در حالت ایدهآل، ولتاژ خروجی یک اینورتر میبایست تا حدامکان به موج سینوسی خالص نزدیک بوده و حداقل هارمونیکهای مزاحم را داشته باشد و به این منظور، از تکنیکهای مختلفی مانند موارد زیر استفاده میشود:
• مدولاسیون عرض پالس چند سطحی ((Multi-Level PWM
• مدولاسیون عرض پالس سینوسی (Sinusoidal PWM)
• مدولاسیون عرض پالس با بردار فضایی (Space Vector PWM) یا SVPWM
• مدولاسیون عرض پالس با تزریق هارمونیک سوم (Third Harmonic Injection PWM) یا THIPWM
فیلترهای رزونانسی (Resonant Filter) یا همان فیلترهای میانگذر (Band-Pass Filter) در طبقه خروجی اینورتر وظیفه عبوردادن هارمونیک اصلی و تضعیف هارمونیکهای فرعی باقیمانده را برعهده دارند. اجزای اصلی این فیلترها، یک خازن و یک سلف سری است که مقادیر ظرفیت خازن و اندکتانس سلف به گونهای انتخاب شده که در فرکانس هارمونیک اصلی با یکدیگر رزونانس کرده و مدار معادل آنها اتصال کوتاه خواهد بود. اما برای هارمونیکهای فرعی که دارای فرکانس بالاتر میباشند، اندوکتانس سلف سبب تضعیف شدید دامنه هارمونیک خواهد شد.
به طور کلی وقتی THD<۳% باشد، اینورتر جزء «دسته سینوسی خالص» (Pure Sine Wave یا PSW) درنظر گرفته میشود.
ساختمان اینورتر :
در بخش قبل توضیح داده شد که چگونه برای ساخت شکل موج سینوسی، از خاموش/روشن (Switching) یک ولتاژ DC ثابت استفاده میشود. به نحوی که در سری فوریه شکل موج خروجی، فرکانس هارمونیک اصلی برابر فرکانس شکل موج سینوسی ایدهآل خروجی بوده و دامنه هارمونیکهای فرعی با روشهای مختلف تضعیف میگردند.
به منظور تولید پالس از ورودی DC پیوسته اینورتر از سمت باتری یا بانک باتریها، از سوییچهای سریع الکترونیکی شامل IGBT یا MOSFET استفاده میشود. برتری IGBT نسبت به MOSFET در قابلیت استفاده درولتاژهای بسیار بالاست. اما برتری MOSFET نسبت به IGBT در قابلیت استفاده در فرکانسهای بسیار بالا و همچنین تلفات کمتر و در نتیجه راندمان بهتر است. به طور خلاصه معمولاً از MOSFET برای رنج ولتاژ کمتر از ۲۵۰ ولت و فرکانس بیش از ۲۰۰ کیلوهرتز و از IGBT برای رنج ولتاژ بیش از ۱۰۰۰ ولت و فرکانس کمتر از ۲۰ کیلوهرتز استفاده میشود. در ناحیه میانی این رنج، بسته به ملاحظات طراحی کاربرد هر دو معمول است.
افزایش سطح ولتاژ ورودی از سمت بانک باتری بسته به نوع طراحی یا در بخش DC اینورتر توسط «مبدل افزاینده» (Boost Converter) یا در بخش AC توسط ترانسفورمر افزاینده انجام میپذیرد.
برای تولید پالس از تکنیکهای مختلف «مدولاسیون عرض پالس» (Pulse width Modulation یا PWM) استفاده میشود که در اینجا یک نوع معمول آن در اینورترهای رایج توضیح داده میشود:
تولید پالس :
خروجی دو ژنراتور سیگنال که یکی موج سینوسی دقیق با فرکانس ۵۰ هرتز مطابق هارمونیک اصلی و دیگری «موج دندانه ارهای» (Saw Tooth Wave) با فرکانس ۲۰ کیلوهرتز میسازد، وارد یک «مقایسهکننده»(Comparator) میگردند. در محل برخورد این ۲ موج به ازای لبه پایینرونده شکل موج دندانهارهای پالس آتش (Trigger) برای گیت (Gate) سوییچهای MOSFET یا IGBT ارسال و در مقابل روی لبه بالارونده، پالس خاموش صادر میگردد.
به موج دندانه ارهای، «موج حامل» (Carrier) گفته میشود و دلیل انتخاب فرکانس ۲۰ کیلوهرتز برای آن، فاصله داشتن نویز صوتی تولید شده توسط سیمپیچ سلفها از آستانه شنوایی انسان است. همچنین افزایش این فرکانس، سبب کاهش دامنه هارمونیکهای فرعی و نزدیکتر شدن شکل موج خروجی به حالت ایدهآل سینوسی نیز میگردد. اما در مقابل، تلفات سوییچینگ نیز افزایش مییابد و بنابراین در اینورترهای رایج، از فرکانسهای خیلی بالا مثلاً در رنج مگاهرتز استفاده نمیشود.
در محاسبه عرض پالس PWM یک فیدبک از ولتاژ خروجی نیز درنظر گرفته میشود تا اثر افت ولتاژ خروجی در اثر افزایش بار (جریان خروجی) حذف شود.
پل H :
یک شکل بسیار رایج ساختار بخش خروجی اینورتر، قراردادن بار بین سوییچهای MOSFET یا IGBT به شکل حرف H انگلیسی است که به آن «پل اچ» (H-Bridge) گفته میشود.
مزایا :
• فقط با تغییر الگوی سوییچینگ و بدون نیاز به ترانس با نقطه وسط میتوان به ۳ سطح ولتاژ Vdc/۲+ و Vdc/۲- و ۰ دست یافت.
• اگر بار موتور باشد، با تغییر الگوی سوییچینگ به راحتی میتوان موتور را در دو جهت چپگرد یا راستگرد تغذیه نمود و به عنوان مثال، آسانسور را در دو جهت بالا یا پایین هدایت نمود.
• با توالی (Cascading) تعداد n طبقه H میتوان به راحتی به ۲n+1 سطح ولتاژ دسترسی پیدا کرد و به این وسیله، THD اینورتر را کاهش داد .
افزایش تعداد طبقات H منجر به تولید اینورترهای با ۳ سطح PWM و بالاتر (۵ و۷ و ۹ و …) میگردد که این افزایش، مزایای زیر را به دنبال دارد:
• کاهش دامنه هارمونیکها و کاهش THD
• کاهش تلفات ناشی از تغییرات شدید شیب ولتاژ موسوم به تلفات dv/dt
معایب :
• افزایش هزینه اینورتر به دلیل افزایش تعداد المانها
• پیچیدهترشدن الگوریتم کنترلی
• افزایش تلفات سوییچینگ به دنبال اضافه شدن ۴ سوییچ به دنبال اضافه شدن هر طبقه
• نیاز به سیستم خنککننده با ظرفیت بالاتر که منجر به افزایش هزینه و وزن اینورتر میگردد.
شکلهای ۳ و ۴ و ۵ به ترتیب مدار تولید PWM نوع ۳ سطحی، موج Carrier دندانه ارهای و شکل موج خروجی فیلتر نشده آن را نشان میدهند:
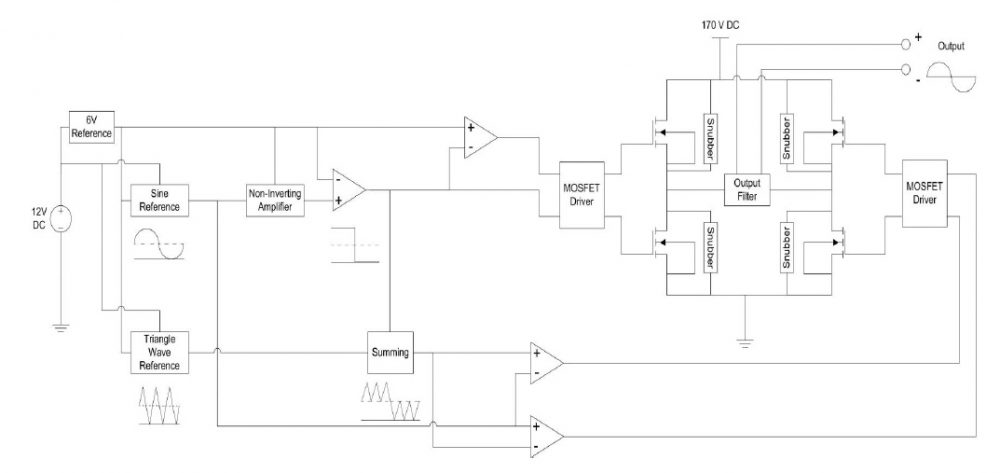
شکل ۳ : مدار تولید PWM نوع ۳ سطحی

شکل ۴ : موج حامل (Carrier) دندانه ارهای برای PWM نوع ۳ سطحی
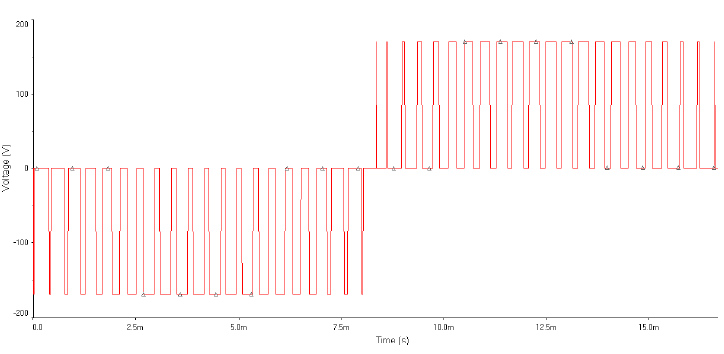
شکل ۵ : خروجی فیلترنشده اینورتر با تکنیک PWM نوع ۳ سطحی
شکلهای ۶ و ۷ و ۸ به ترتیب مدار تولید PWM نوع ۵ سطحی، موج Carrier دندانه ارهای و شکل موج خروجی فیلتر نشده آن را نشان میدهند:
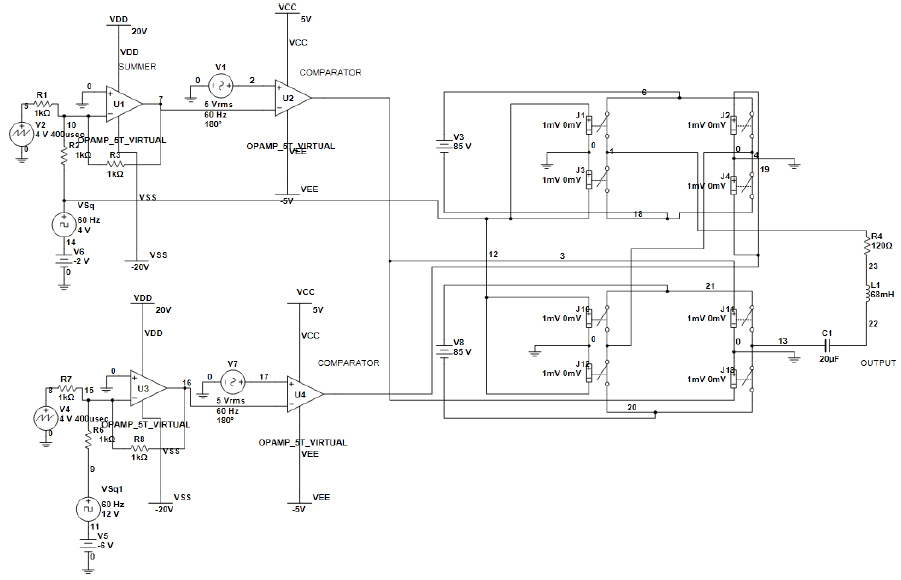
شکل ۶ : مدار تولید PWM نوع ۵ سطحی
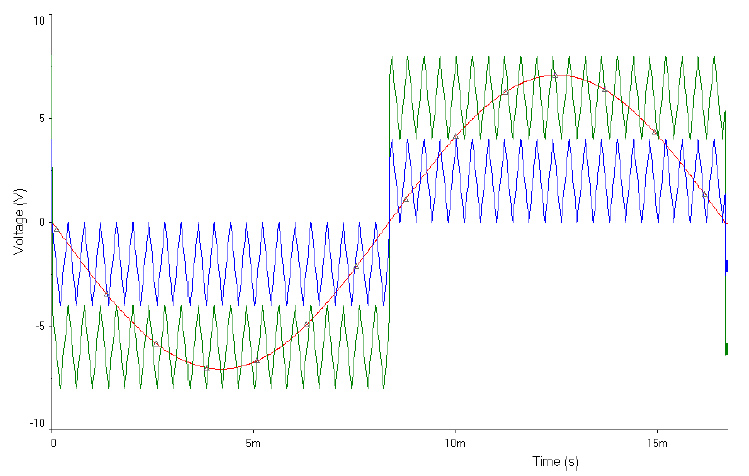
شکل ۷ : موج حامل (Carrier) دندانه ارهای برای PWM نوع ۵ سطحی
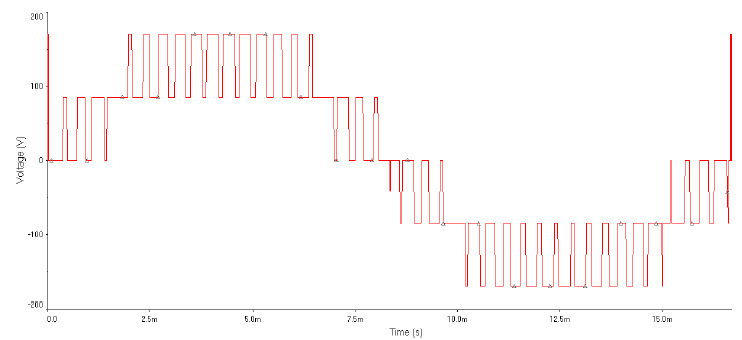
شکل ۸ : خروجی فیلترنشده اینورتر با تکنیک PWM نوع ۵ سطحی
از بررسی شکلهای فوق نکات زیر قابل تشخیص هستند:
۱) افزایش هر ۲ سطح PWM نیاز به افزایش یک طبقه H، یک جمعکننده (Summer) و یک مقایسهکننده (Comparator) دارد.
۲) در مدار اینورتر PWM سه سطحی ورودی۱۷۰V DC است. اما در مدار اینورتر PWM پنج سطحی به ازای افزایش یک طبقه H، ورودی به دو نیمه ۸۵ ولتی تقسیم شده که نیمه تغذیه یک طبقه را مستقلاً بر عهده دارد.
۳) چون در لحظه قطع سوییچ جریان بار با ضریب قدرت پسفاز یا سلفی (Inductive) به طور آنی صفر نخواهدشد، سوییچینگ این نوع بارها موجب ایجاد جرقه (Spike) به دلیل ایجاد قوس الکتریکی ناشی از القای ولتاژ بالا در دو سر سوییچ میگردد که در نهایت آسیب دایمی به آن وارد خواهد آورد. همچنین احتمال وصلشدن ناخواسته سوییچ نیز در اثر ولتاژ معکوس بالا وجود دارد. از این رو، نصب مدارSnubber دیودی یا مقاوتی-خازنی (RC) به صورت موازی با سوییچها الزامی است.
۴) یک فیلتر میانگذر LC سری با بار برای جلوگیری از عبور هارمونیکهای بالا نصب شده است.
انواع اینورتر از لحاظ شکل موج خروجی :
همان گونه که در بخش قبل به تفصیل توضیح داده شد، اینورترها از لحاظ شکل موج خروجی به ۲ دسته عمده زیر تقسیم میشوند:
۱) اینورتر سینوسی خالص (PSW) :
ضریب اعوجاج شکل موج یا همان THD این گونه اینورترها زیر %۳ است و برای تغذیه بارهای AC که به سینوسی بودن کامل شکل موج حساس هستند (مانند درایوهای کنترل سرعت موتور، شمارندههای پالس ساعت و برخی انواع لامپهای روشنایی کممصرف CFL و LED) کاربرد دارند.
به دلیل وجود المانهای داخلی بیشتر و همچنین سیستم کنترلی پیچیدهتر، قیمت و وزن این نوع اینورترها بسیار بیشتر از اینورترهای شبه سینوسی در رنج توانی یکسان میباشند.
۲) اینورتر شبه سینوسی (MSW) :
ضریب اعوجاج شکل موج یا همان THD این گونه اینورترها بالای %۳ است و برای تغذیه بارهایی که به سینوسی بودن کامل شکل موج حساس نیستند (مانند بارهایی که خود دارای منبع تغذیه داخلی یا خارجی DC هستند و یا بارهای اهمی) کاربرد دارند.
ساختمان داخلی این نوع اینورترها و همچنین الگوریتم کنترلی آنها بسیار سادهتر از اینورترهای سینوسی خالص بوده و همین امر، توجیه قیمت و وزن بسیار پایینتر این نوع اینورتر نسبت به نوع سینوسی خالص همتوان خود میباشد.
انواع اینورتر از لحاظ ورودی یا اتصال به شبکه :
اینورترها از لحاظ اتصال به شبکه برق شهری دارای انواع زیر هستند:
۱) اینورتر جدا از شبکه (Off-Grid) :
این نوع اینورترها فقط دارای ورودی از سمت بانک باتری سیستم سولار است و دارای ورودی تغذیه پشتیبان (Backup Power Supply) از سمت شبکه برق سراسری یا دیزل ژنراتور نمیباشد و برای بارهای غیرحساس که قطع تغذیه آنها مشکل خاصی ایجاد نمینماید، استفاده میشوند.
۲) اینورتر متصل به شبکه (On-Grid یا Grid-Tied) :
در این نوع اینورترعلاوه بر ورودی اصلی از سیستم سولار، یک ورودی کمکی از برق شهری یا دیزل ژنراتور نیز صورت پذیرفته تا تغذیه بارهای ویژه مانند تجهیزات پزشکی یا بارهای حساس صنعتی دچار وقفه نگردد.
۳) اینورتر ترکیبی (Hybrid) :
سیستم کنترلی و رابط کاربری (User Interface) این نوع اینورتر، قابلیت انتخاب استراتژیهای مختلف کنترلی بر حسب اولویت با تغذیه از سیستم سولار یا شبکه برق را داده و کاربر، میتواند آستانههای ویژه برای تعریف دشارژ و شارژ مجدد بانک باتری یا کم باری (Low-Load) و بیباری (No-Load) را خود برای اینورتر انتخاب و برنامهریزی نماید.

شکل ۹ : اینورتر ۱۰ کیلووات جدا از شبکه
به عنوان نمونه، اینورترهای ترکیبی قابلیت برنامهریزی و انتخاب مدهای کاری زیر را در اختیار کاربر میگذارد:
۱) اولویت با سیستم سولار :
در این مد عملکرد، اینورتر اولویت تغذیه بار را ابتدا به ورودی سولار میدهد که شامل حالات زیر است:
۱-۱) روز آفتابی:
اگر تولید پنلهای سولار هم برای تغذیه بار و هم شارژ باتریها کافی باشد، ورودی شبکه قطع میگردد.
۲-۱) روز ابری با پشتیبانی شبکه :
تغذیه بار ابتدا از ترکیب پنلهای سولار و باتریها انجام شده و پس از تخلیه آنها تا میزان معین، با سوییچ خودکار از شبکه انجام میگردد. در اینجا، پنلهای سولار شروع به شارژ باتریها مینمایند و پس از رسیدن شارژ به میزان کافی، دوباره تغدیه بار از ترکیب پنلهای سولار و باتریها انجام شده و ورودی شبکه قطع میگردد.
۳-۱) شب با پشتیبانی شبکه، بدون شارژ باتری :
تغذیه بار ابتدا توسط باتریها و پس از تخلیه آنها تا میزان معین، با سوییچ خودکار از شبکه انجام میگردد.
۴-۱) شب با پشتیبانی شبکه، با شارژ باتری :
پس از تخلیه باتریها، شبکه وظیفه تغذیه بار و شارژ باتریها را انجام میدهد.
۵-۱) شب بدون پشتیبانی شبکه :
در صورت قطع شبکه، بار فقط توسط باتریها تغذیه میگردد.
۲) اولویت با شبکه برق :
در این مد عملکرد، اینورتر اولویت تغذیه بار را ابتدا به ورودی برق شهر (یا دیزل ژنراتور) میدهد که شامل حالات زیر است:
۱-۲) روز با شبکه نرمال :
بار توسط شبکه تغذیه میگردد و پنلهای سولار فقط باتریها را شارژ مینمایند.
۲-۲) روز پس از قطع شبکه :
تغذیه بار از ترکیب پنلهای سولار و باتریها انجام میگردد.
۳-۲) شب پس از قطع شبکه :
تغذیه بار فقط توسط باتریها انجام میگردد.
۳) حالت Bypass :
در صورت بروز اضافه بار (Over Load) یا هر مشکل دیگر برای اینورتر، Bypass به صورت خودکار انجام و تغذیه بار مستقیماً از شبکه برق بدون عبور از اینورتر و فیلتر انجام میگردد.
۴) حالت تعمیرات (Maintenance) :
جهت تداوم تغذیه بار هنگام نیاز به تعمیرات اینورتر، سوییچ به حالت Bypass به صورت دستی قابل انجام است.








